
Tentang Getaran Encoder
Getaran yang bekerja pada enkoder selalu menyebabkan pulsa salah dengan mudah.
Jadi kita harus lebih memperhatikan tempat kerja encoder.
Semakin banyak pulsa per putaran, semakin sempit groovy grating, efek ore ke encoder oleh getaran, ketika kecepatan motor rendah atau bahkan berhenti, getaran yang bekerja pada poros encoder atau shell encoder akan menyebabkan getaran kisi, dengan cara ini, encoder mungkin menunjukkan kesalahan sinyal pulsa.
Feather dari SC65F encoder
Merek: HENGXIANG
Jenis enkoder: Enkoder inkremental
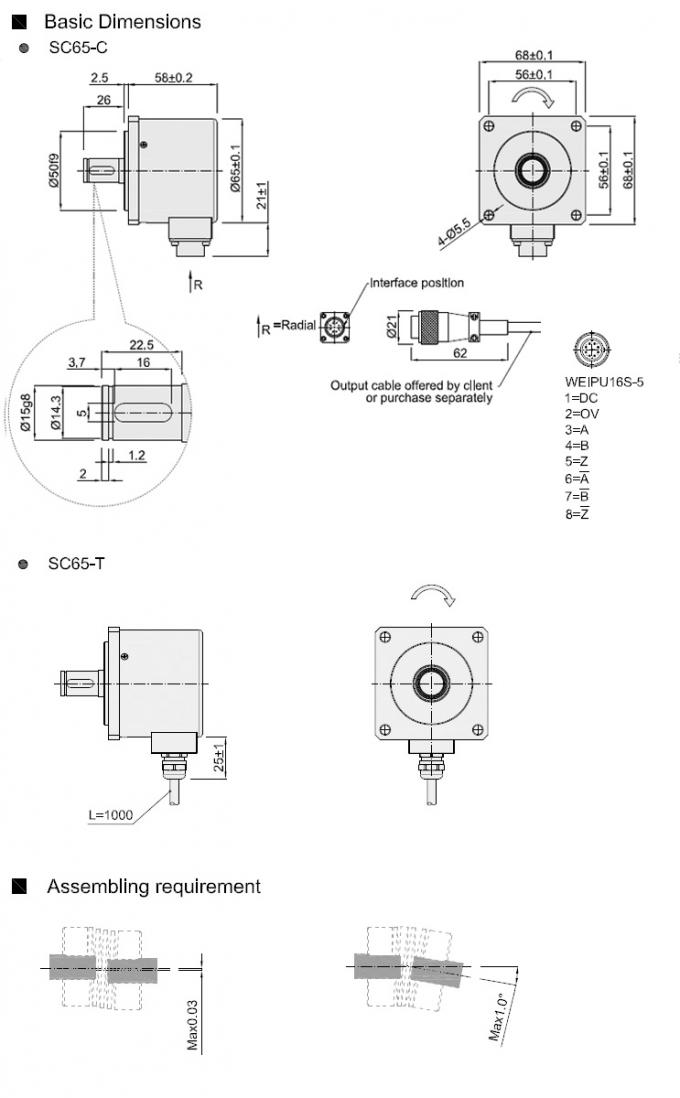
Diameter luar: 65mm
Dimensi mengarah: 68mm x 68mm
Panjang poros: 26mm
Diameter poros padat: 15mm (KEYWAY 5mm)
Tegangan Muatan: ≤DC30V
GND: tidak terhubung ke encoder
Kemampuan Produksi Encoder Pabrik
5000 potong per bulan
-------- Kapasitas Lini Produksi
50.000 lembar per tahun
-------- Unit Aktual Diproduksi (Tahun Sebelumnya)
Mengapa memilih kami?
Merek HENGXIANG - Mitra tepercaya
CE disetujui - kualitas produk yang diuntungkan;
Pengiriman cepat - kemampuan stok produk yang kuat;
Pabrik langsung memberikan harga yang kompetitif;
Layanan satu atap - untuk pengalaman pembelian Anda yang efisien;
Desain OEM diterima - desain disesuaikan, merek Anda sendiri diterima.
Karakteristik Encoder SC65F
| Item | Parameter dasar |
| Merek | HENGXIANG |
| Jenis enkoder | Encoder tambahan |
| Diameter luar | 65mm |
| Ketebalan | 58mm |
| Dimensi mengarah | 68mm x 68mm |
| Dimensi instalasi | 56mm x 56mm |
| Panjang poros | 26mm |
| Diameter poros padat | 15mm (KEYWAY 5mm) |
| Resolusi | 50; 60; 100; 200; 250; 256; 300; 360; 400; 450; 500; 512; 600; 720; 1000 |
| 1000; 1024; 1200; 1250; 1440; 1800; 2000; 2048; 2500; 2880; 3000; | |
| 3600; 4000; 4096; 5000; 5760; 8192; 10000; 11520; 16384; 20000; 23040 | |
| Fase keluaran | Fase A +, B +, Z +, A- B- Z- |
| Tegangan suplai | DC5V ; DC8-30V |
| GND | tidak terhubung ke encoder |
| Tandai perbandingan Space dengan Space | 45% hingga 55% |
| mulai torsi | kurang dari 10m Nm |
| Momen Intertia | kurang dari 3x10-6kg.m2 |
| Beban poros | Radial 30N; 20N aksial |
| REV teratas | 5000RPM; IP65≤3000 RPM |
| Kehidupan bantalan | 1,5x109 putaran pada beban terukur (100000 jam pada 2500RPM) |
| Suhu lingkungan | Operasi: -20 ~ + 80 ° ; penyimpanan: -25 ~ + 85 ° |
| Kelembaban lingkungan | Pengoperasian dan penyimpanan: 35-85% RH (nonkondensasi) |
| Getaran (bertahan) | Amplitudo 0,75mm, 5-55Hz, 2 jam untuk tiga sumbu secara terpisah |
| Sock (bertahan) | 490m / s2, 11 ms tiga kali untuk arah X, Y, Z secara terpisah |
Prinsip encoder
Akurasi DNL adalah kesalahan sudut fase sebagai nilai absolut yang diberikan dalam derajat (mekanis).
Encoder tambahan menghasilkan jumlah pulsa yang ditentukan per putaran, sehingga setiap pulsa diharapkan berada pada posisi mekanik yang ditentukan. Deviasi maksimum antara posisi ideal ini dan posisi aktual disebut integral non linieritas (INL). Akurasi INL adalah nilai penting jika encoder tambahan digunakan untuk tugas penentuan posisi.
Siklus tugas menjelaskan rasio antara waktu "tinggi" ke waktu "rendah" dari enkoder inkremental. Biasanya rasio ini adalah 50/50, yang setara dengan 180 el ° tinggi dan 180 el ° rendah.
Performa encoders inkremental magnetik meningkat dengan pengaturan PPR yang lebih tinggi dan kecepatan putaran yang lebih tinggi (RPM). Ini berbeda dengan optical encoders di mana kinerjanya menurun. Akurasi DNL dan INL yang dinyatakan dalam lembar data kami adalah nilai kasus terburuk, kinerja yang lebih baik dapat diharapkan untuk PPR dan RPM yang lebih tinggi.
Ini adalah frekuensi maksimum yang bisa dihasilkan oleh encoder melalui jalur output.
Sebagai contoh, frekuensi encoder 1024 PPR yang berputar pada 600 RPM adalah 200 Hz (200 * 1024 / 60s).
Produk kami dijual di seluruh dunia. Anda dapat yakin dengan seluruh proses produk kami.


