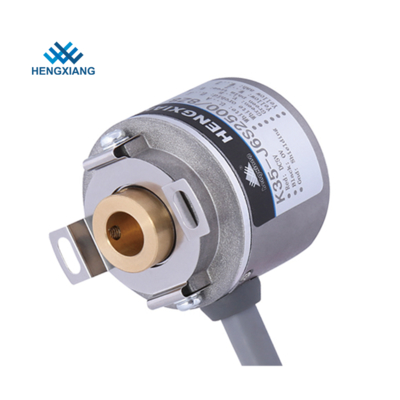
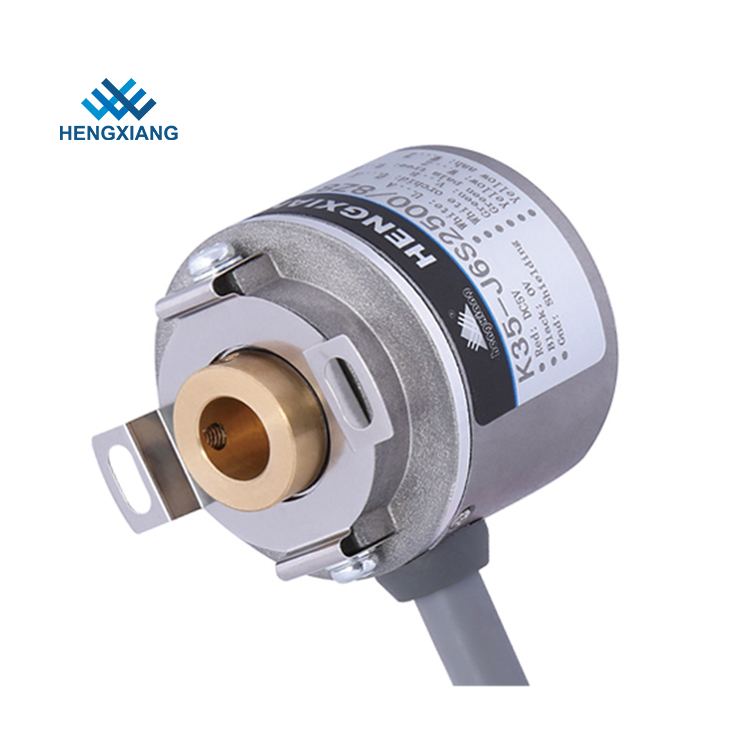
Blind Hole 8mm 5000RPM Miniatur Rotary Encoder
Deskripsi Produk
Fitur Utama dari encoder motor servo K35
Kehidupan bantalan: 1,5x109 putaran pada beban pengenal (100000 jam pada 2500RPM)
Suhu lingkungan: Pengoperasian: -20 ~ + 80 ° ; penyimpanan: -25 ~ + 90 °
Getaran (tahan): Amplitudo 0,75mm, 5-55Hz, 2 jam untuk tiga sumbu secara individual
Sock (tahan): 490m / s2, 11 ms tiga kali untuk arah X, Y, Z secara individual
Sertifikasi: CE
REV Teratas: 5000RPM
Rasio Mark to Space: 45% hingga 55%
Beban poros: Radial 30N;Aksial 20N
Beberapa nomor model encoder K35 Terkait
Pelat pegas K35-J12C2500 / 8B6 DC5V 35T40
K35-J12L2000 / 4B8 DC5V pelat pegas 35T29
K35-J3N2500 / 16B10 DC5-12V pelat pegas 35T29
K35-J3F1200B6 DC12-24V pelat pegas 35T29
Pelat pegas K35-J6S2500 / 8B8 DC5V 35T29
K35-J6C2000B10 DC5V pelat pegas 35T40
K35-J6E720B6 DC8-30V pelat pegas 35T29
K35-J12C1000 / 4B8 DC5V pelat pegas 35T40
K35-J12L2048 / 6B10 DC5V pelat pegas 35T40
Spesifikasi
| nama Produk |
Lubang buta 8mm diameter luar 35mm K35 miniatur rotary encoder 40mm pegas daun |
|
Merek |
HENGXIANG |
| Jenis Encoder | Pembuat enkode tambahan |
|
Dimensi-dimensi eksternal |
Diameter luar: 35mm Ketebalan: 35mm |
|
Dimensi instalasi |
40mm (pelat pegas 35T40);29 mm (35T29) |
|
Jenis poros berongga |
lubang buta |
|
Diameter poros berongga |
6mm, 8mm; 10mm |
|
Resolusi |
30; 36; 50; 60; 100; 200; 250; 256; 300; 360; 400; 450; 500; 512; 600;1000; 1024; 1200; 2000; 2048; 2500;4096; 5000 1000/4; 1000/6; 1000/8; 1024/4; 1024/6 ; 1024/8 ; 2000/4 ; 2000/6 ; 2000/8 ; 2048/4 ; 2048/6; 2048/8 ; 2500 / 4 ; 2500/6 ; 2500/8; 4096/4; 4096/6; 4096/8; 5000/4; 5000/6; 5000/8 |
|
Fase keluaran |
Fase A +, B +, Z +, A-, B-, Z-, U +, V +, W +, U-, V-, W- |
|
Tegangan suplai |
DC5V & DC8--30V |
|
Jenis outlet |
Kabel keluar dari samping |
|
Mode keluaran |
NPN / PNP (Output Kolektor Terbuka) Output tegangan Keluaran dorong-tarik garis drive (26LS31) TTL garis drive (DC8-30V) HTL |
|
Tingkat perlindungan |
IP50 |
|
Panjang kabel |
500mm |
|
paket |
Kardus |
| Sertifikasi | CE |
![]()
Nilai Jual Kami
Tentang Getaran Encoder
Getaran yang bekerja pada encoder selalu menyebabkan pulsa salah dengan mudah.
Jadi kita harus lebih memperhatikan tempat kerja encoder.
Semakin banyak pulsa per putaran, semakin sempit jarak groovy kisi, efek bijih ke encoder oleh getaran, saat kecepatan motor rendah atau bahkan berhenti, getaran yang bekerja pada poros encoder atau shell encoder akan menyebabkan getaran kisi, dengan cara ini, encoder mungkin menunjukkan kesalahan sinyal pulsa.
Tentang Pabrik Kami
Informasi Lebih Lanjut
Jika Anda mencari informasi lebih lanjut tentang pabrik kami atau tentang produk kami, silakan hubungi kami atau email kami sekarang, kami akan membalas Anda sesegera mungkin.
Produk kami dijual di seluruh dunia. Anda dapat yakin dengan seluruh proses produk kami.